本文章內容係以參考技術文件為基礎,經由人工智慧(AI)技術進行改寫及重整,旨在提供讀者更清晰易懂之內容呈現。如有任何技術細節上的疑義或需進一步確認,建議讀者參考原始技術文件或與相關技術人員聯繫。
想像一下,您的機器人就像一位身懷絕技的舞者,需要眼睛(攝影機)、耳朵(麥克風)、甚至觸覺(光達 LiDAR)等多重感官完美協調,才能展現流暢精準的舞姿。但在機器人世界裡,這些感官(也就是感測器)的訊號,如果沒有在「對的時間點」抵達大腦(處理單元),那會發生什麼事?
輕則動作卡頓、路徑歪斜,重則定位失敗、判斷錯誤,這就是「時間不同步」可能帶來的麻煩!尤其在需要多感測器融合的應用,例如:自主移動機器人 (AMR) 的同步定位與地圖構建 (SLAM)、無人機的精準飛行、或是需要深度學習進行環境感知的應用,感測器數據的時間同步,簡直就是系統穩定與精確的生命線!
為了解決這個棘手的問題,Advantech 隆重推出專為 ROS 2 量身打造的秘密武器——Time Sync Viewer 時間同步檢測工具組!
為什麼「時間同步」這麼重要? #
在機器人系統中,來自不同感測器(如攝影機、慣性測量單元 IMU、光達 LiDAR)的數據,必須被精確地打上時間戳記,並且在處理時能夠對齊。如果時間戳記有偏差,即使只是毫秒之差,都可能導致:
- SLAM 失準: 機器人搞不清楚自己身在何處,地圖建構錯誤百出。
- 感測器融合失敗: 系統無法正確整合來自不同感測器的資訊,做出錯誤判斷。
- 深度學習模型效能低落: 輸入的數據時間點錯亂,影響模型訓練與推論的準確性。
簡單來說,時間不同步就像樂團演奏時,有人快了半拍、有人慢了半拍,最終只會譜出混亂的樂章。
Advantech Time Sync Viewer:您的時間同步好幫手 #
Time Sync Viewer 包含兩大核心工具:RQT Time_Sync_Viewer Plugin(視覺化檢視外掛)和 ROS2 Time_Sync_Checker Node(時間同步檢查節點),它們聯手為開發者提供了一套完整、易用的解決方案。
核心亮點:
- 揪出異常: 自動檢測可能導致數據不完整的硬體延遲、網路抖動或數據丟失。
- 多感測器同步監控: 同時監看多個感測器的時間戳記,確保它們步調一致。
- 即時同步旗標 (sync_flag): 當數據滿足同步條件時,自動觸發旗標,提供即時確認。
- 量化分析: 計算同步頻率、平均時間間隔、標準差等統計數據,精準評估同步效能。
- 視覺化介面: 透過
Time_Sync_Viewer圖形介面,時間軸上的數據對齊狀況一目了然,不再霧裡看花。 - 優化感測器融合: 提升數據一致性與穩定性,讓 SLAM、機器手臂、無人機、AMR 等應用如虎添翼!
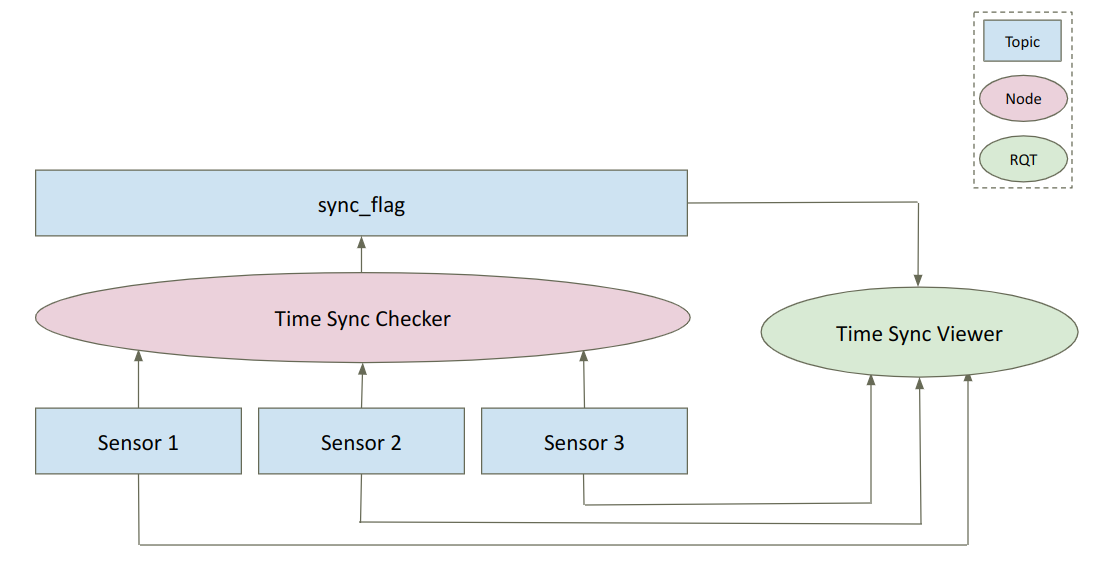
系統架構一覽:
感測器數據輸入後,會先經過 Time_Sync_Checker Node 進行時間同步檢查,並輸出同步旗標。最後,RQT Time Sync Viewer Plugin 將結果視覺化呈現。
立刻上手:安裝與建置 #
準備好體驗 Time Sync Viewer 的威力了嗎?跟著以下步驟輕鬆安裝:
(請注意:本工具目前僅支援 ROS 2 Humble 版本)
wget https://iedgeblob.blob.core.windows.net/iedge-public/ros2-timesync-tools/ros2-timesync-tools-1.0.0-Ubuntu_22.04-x64.run
sudo ./ros2-timesync-tools-1.0.0-Ubuntu_22.04-x64.run
cd /usr/local/Advantech/ros/humble/ros2-timesync-tools
colcon build --symlink-install
RQT Time_Sync_Viewer Plugin:讓時間同步「看得見」 #
這個 RQT 外掛程式是您的視覺化利器,專門用來檢查 ROS 2 環境中,訂閱的多個感測器數據是否同步。對於需要分析攝影機、IMU、LiDAR 時間對齊的機器人應用來說,它簡直是天賜的禮物!
圖形介面(GUI)能告訴您什麼?
以下以同時監控攝影機、IMU、LiDAR,並搭配 Time_Sync_Checker Node 為例:
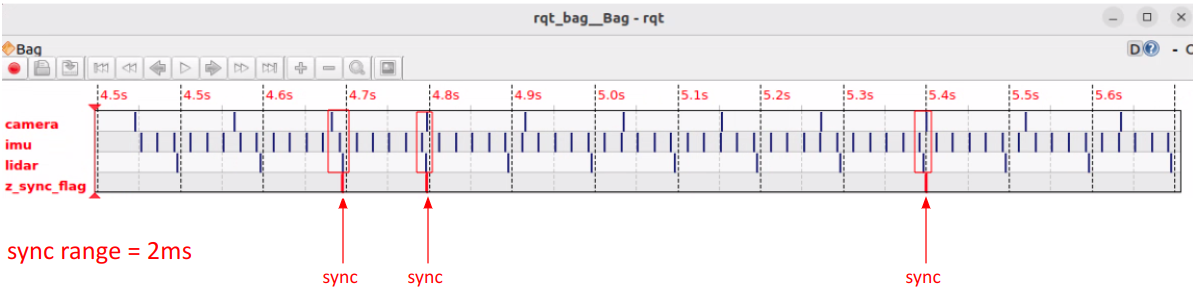
- 時間軸顯示:
- 圖中顯示了不同數據流(ROS Topics)的時間戳記,每一條水平線代表一個 Topic。例如:
camera(攝影機影像)imu(IMU 數據)lidar(LiDAR 掃描)z_sync_flag(同步旗標)
- 圖中顯示了不同數據流(ROS Topics)的時間戳記,每一條水平線代表一個 Topic。例如:
- 同步範圍:
- 在此範例中,
Time_Sync_Checker Node設定的同步範圍 (sync range) 是 2 毫秒 (ms)。這表示,在 2 毫秒時間窗內抵達的數據點,會被視為同步。 - 當觸發同步事件時,時間軸上會標記一個
sync flag。
- 在此範例中,
- 同步分析:
- 當所有感測器的數據點都落在設定的 2ms 範圍內時,它們就被視為同步 (sync)。
- 下圖顯示了多個同步點,表示在這些時刻,感測器數據是良好同步的。
如何使用 RQT Plugin?
cd /usr/local/Advantech/ros/humble/ros2-timesync-tools
source install/setup.bash
rqt --force-discover
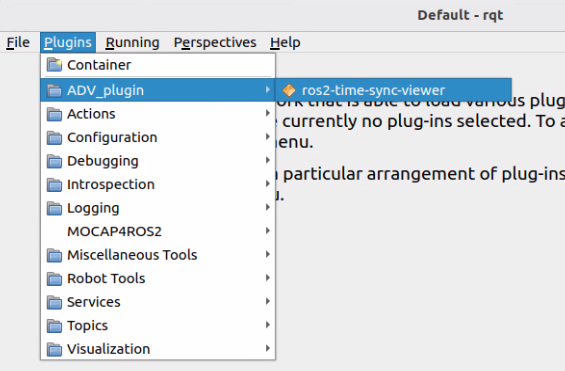
步驟 1: 在 RQT 介面中選擇 ros2_time_sync_viewer 外掛。
步驟 2: 點擊「錄製」(record) 按鈕。

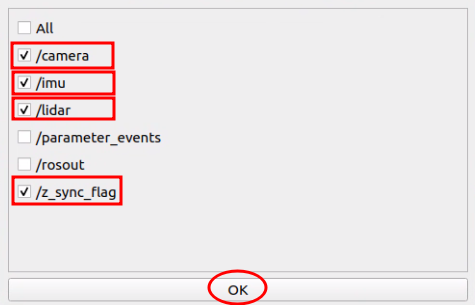
步驟 3: 選擇您想要監控的 Topics。
步驟 4: 查看視覺化的同步結果!

ROS2 Time_Sync_Checker Node:幕後的同步把關者 #
Time_Sync_Checker Node 是實際執行同步檢查的核心節點。它會監控來自不同 Topic 的數據,是否在您指定的時間範圍內到達。
主要功能:
- 觸發同步旗標: 當同步事件發生時,發布一個
sync_flagTopic,方便其他節點或開發者驗證同步效能。 - 提供詳細統計數據:
指標 (Metric) 說明 (Description) Sync Frequency 每秒觸發同步回調 (synchronized_callback) 的次數 (Hz)。 Avg Interval 每次回調之間的平均時間間隔 (秒)。 Std Dev 時間間隔的標準差 (秒),表示同步的穩定性(數值越小越穩定)。 Max Interval 最大時間間隔,顯示最長的延遲。 Min Interval 最小時間間隔,顯示最短的同步時間。
如何設定與執行?
同樣以攝影機、IMU、LiDAR 為例:
設定:
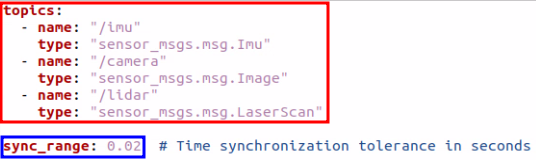
首先,您需要在 config.yaml 檔案中設定參數。
cd /usr/local/Advantech/ros/humble/ros2-timesync-tools/src/ros2-time-sync-checker/time_sync_checker
vim config.yaml
- 下圖紅色框內,指定需要同步的 Topics 及其數據格式 (Type)。
- 下圖藍色框內,設定時間同步的範圍 (sync_range),單位是秒 (例如 0.002 代表 2ms)。
執行:
啟動 Time Sync Check Node。
cd /usr/local/Advantech/ros/humble/ros2-timesync-tools
source install/setup.bash
ros2 run time_sync_checker time_sync_checker
執行後,您會在終端機看到即時輸出的監控結果與統計數據。

成果與應用:Advantech 助您加速創新 #
Time Sync Viewer 不僅僅是一個工具,它代表了 Advantech 在機器人技術領域的持續投入與創新實力。透過這套工具,開發者可以:
- 大幅縮短除錯時間: 快速定位並解決棘手的時間同步問題。
- 提升系統可靠性: 確保多感測器數據的一致性,讓機器人運行更穩定。
- 優化應用效能: 為 SLAM、感測器融合、深度學習等應用打下堅實的數據基礎。
- 加速產品開發: 讓開發團隊能更專注於核心演算法與應用功能的創新。
無論您是在開發下一代 AMR、高精度無人機,還是複雜的機器人協作系統,Time Sync Viewer 都能助您一臂之力,確保您的機器人感官神同步!
結論與未來展望 #
感測器數據的時間同步是現代機器人系統成功的基石。Advantech 推出的 Time Sync Viewer 工具組,以其直觀的視覺化介面、強大的分析能力和易用性,為 ROS 2 開發者提供了解決方案。
這只是 Advantech 在機器人與邊緣運算領域持續耕耘的一小步。我們相信,透過不斷的技術研發與創新,我們能為客戶帶來更多價值,共同開創更智慧、更高效的機器人新時代。敬請期待我們未來更多令人興奮的成果!